3D UAS Flugplanung für die Gebäuderekonstruktion
Die photogrammetrische Datenerfassung komplexer 3D-Objekte unter Verwendung von UAV-Bildern ist mittlerweile eine Standardaufgabe. Software-Tools auf Basis von Algorithmen wie Structure-from-Motion und Multi-View-Stereobildanpassung ermöglichen die vollautomatische Erzeugung von dicht vermaschten 3D-Punktwolken. Im Gegensatz dazu erfordert die Planung und Ausführung eines geeigneten Bildnetzwerks in der Regel erheblichen Aufwand eines menschlichen Experten, da diese Schritte direkt die Genauigkeit und Vollständigkeit der resultierenden Punktwolke beeinflussen.
Wir haben ein Tool für die automatische Flugmissionsplanung entwickelt, das Fluglinien für eine optimale Kamerakonfiguration erzeugt. Dies hält eine ungefähr konstante Objektentfernung aufrecht, stellt eine ausreichende Bildüberlappung bereit und vermeidet unnötige Stationen.
Als Machbarkeitsnachweis verwenden wir das Tool in unserem Forschungsprojekt MoVEQuaD, das auf die Rekonstruktion von Gebäudegeometrien im Zentimeterbereich abzielt. Das Projekt wird vom Bundesministerium für Wirtschaft und Energie gefördert. Partner sind das Geodätische Institut der Universität Hannover und GeoOffice GmbH.
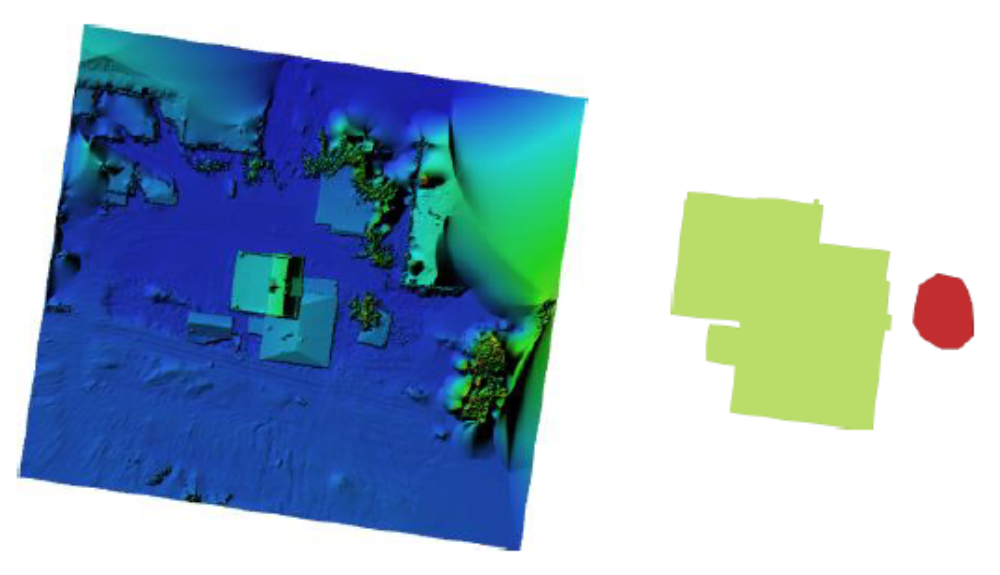
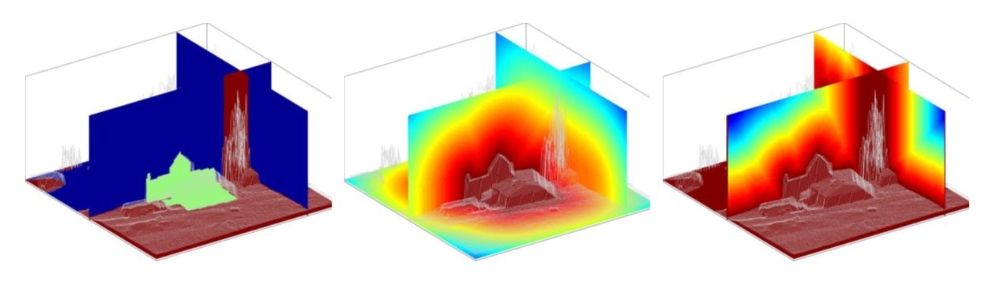
Als Hauptdatenquelle dient ein georeferenziertes 2.5D DSM, zusammen mit einem 2D-Polygon, das die Gebäudekonturen beschreibt (Abbildung 1). Wir erzeugen eine volumetrische Belegungskarte der Gebäudeumgebung, die Voxel in die Klassen Freiraum , Objekt von Interesse und Hindernis klassifiziert (Abbildung 2). Optional kann ein zusätzlicher Satz von Polygonen verwendet werden, um Verbotszonen zu definieren. Diese Option ermöglicht den Ausgleich von unzuverlässig rekonstruierten Bereichen im DSM, z. B. Pfosten, Laternen, Vegetation usw. Das Ergebnis ist eine Reihe von Trajektorien für jede Flughöhe. Einfache Verknüpfungsmanöver verbinden diese Trajektorien mit einer einzigen Mission (Abbildung 3).
Wir haben eine spezielle Smartphone-App entwickelt, um den besonderen Anforderungen dieses Projekts gerecht zu werden. Diese bestehen hauptsächlich aus der Zusammenstellung einer Flugmission, die von der UAV-Firmware gelesen werden kann, von bestimmten Wegpunkten und Standpunkten des Flugplans, Übertragung auf ein UAV und Kontrolle der Ausführung. Bei anderen auf dem Markt verfügbaren Lösungen fehlten bestimmte Merkmale. Viele Apps sind ausschließlich für Nadir-Flüge konzipiert.
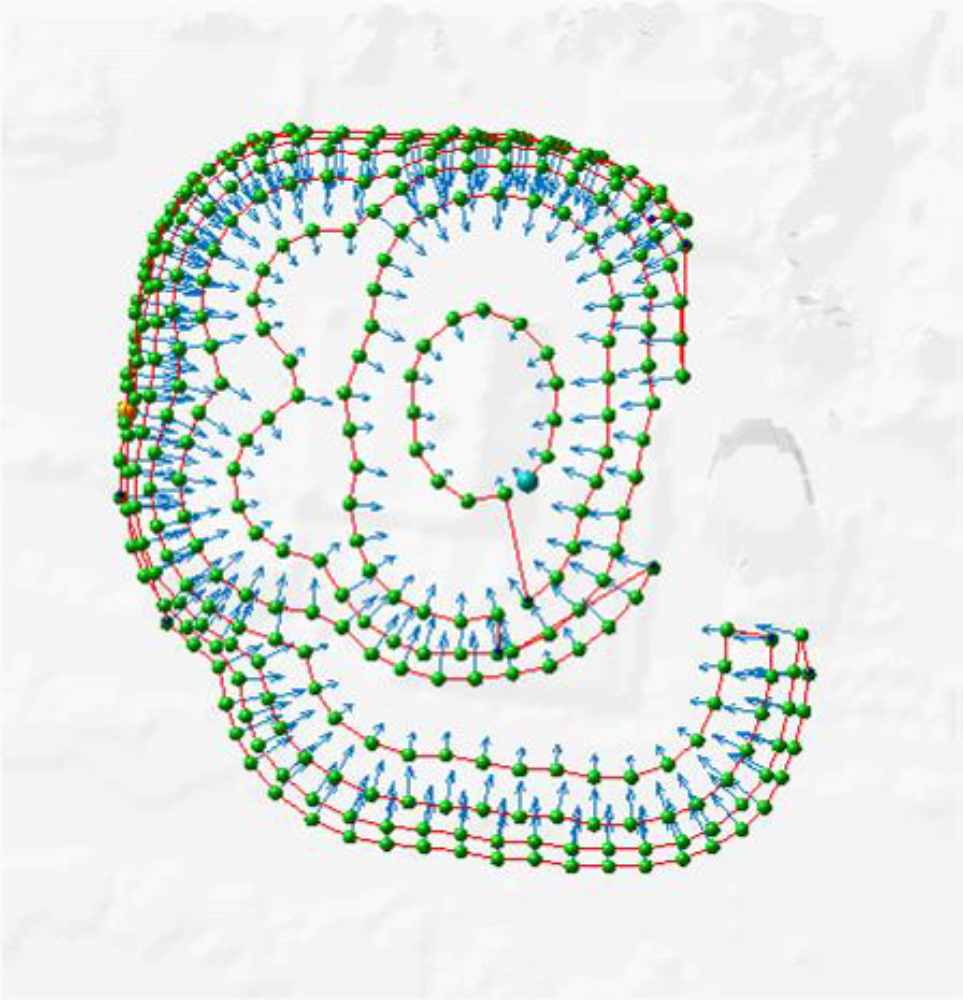
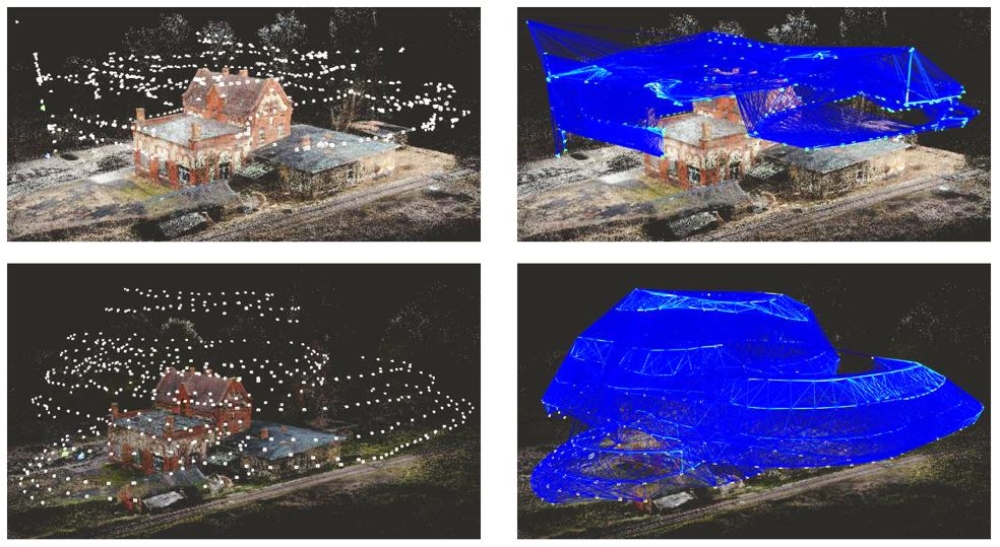
Das System wurde vor Ort mit einem kostengünstigen Quadrocopter (DJI Phantom 4 Pro) getestet. Die resultierende Bildverteilung ist homogen und deckt die Strukturen vollständig ab, während sie gut auf die Oberflächen ausgerichtet (Abbildung 4). Außerdem wurde die Anzahl der aufgenommenen Bilder im Vergleich zu einem manuellen Flug mit Zeitintervallauslösung um mehr als 30% reduziert.
Kontakt
