Erfassung und Visualisierung virtueller 3D-Stadtlandschaften
Die 3D-Datenerfassung und Datenverarbeitung ist im Bereich der Photogrammetrie und Fernerkundung zunehmend möglich und wichtig geworden. Gängige Darstellungen für 3D-Daten sind Punktwolken, volumetrische Darstellungen, projizierte Ansichten (d.h. RGB-D-Bilder oder Renderings) und Vermaschungen.
Texturierte Vermaschungen für die reale Welt, wie sie aus luftgestützten LiDAR- und luftgestützten obliquen UAV-Bildern erzeugt werden, liefern explizite Nachbarschaftsinformationen und hochauflösende Texturierungen.
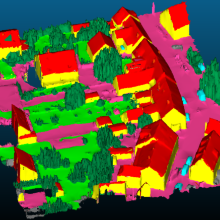
Abbildung 1 zeigt texturierte Vermaschungen, wie sie nur aus DIM (Dense Image Matching) erzeugt werden (links) und wie sie aus DIM- und LiDAR-Daten (rechts) in Drahtgitterform abgeleitet werden.
Mittlerweile sind texturierte Vermaschungen eine Standarddarstellung für die Visualisierung von städtischen Gebieten.
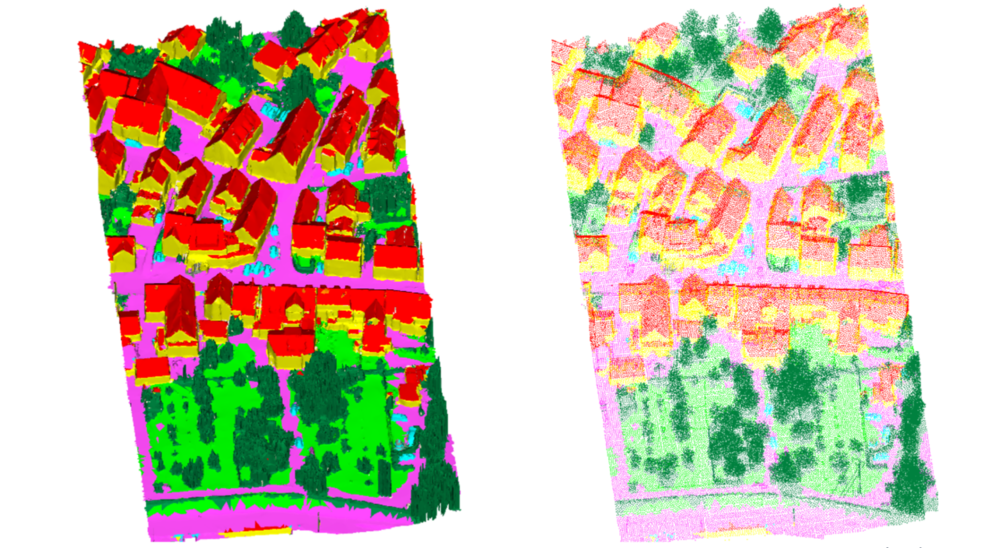
Ihre Klassifizierung in semantische Klassen wie Gebäude, Vegetation, undurchlässige Oberflächen, Straßen usw. bleibt jedoch eine offene Forschungsfrage.
Aktuelle Arbeiten zielen auf die Integration von komplementären luftgestützten LiDAR- und Luftbilddaten für eine verbesserte semantische Segmentierung von Vermaschungen ab.
Die angebrachten Klassenbezeichnungen können auch auf Punktwolken übertragen werden (vgl. Abbildung 2).
Zukünftige Arbeiten werden sich mit der Verknüpfung von Gesichtern und Bildern befassen und damit die bestehende Anbindung der LiDAR-Vermaschung auf den Bildraum erweitern.
{kind=link}
{kind=link}
Kontakt
